Conectar todo
Tu Alquibot tiene un cerebro, que es el microcontrolador Arduino Nano que acompaña el kit. Si lo instalás sobre el mini-protoboard vas a poder hacer las conexiones de forma más simple usando los jumpers, esos cablecitos con conectores en las puntas.
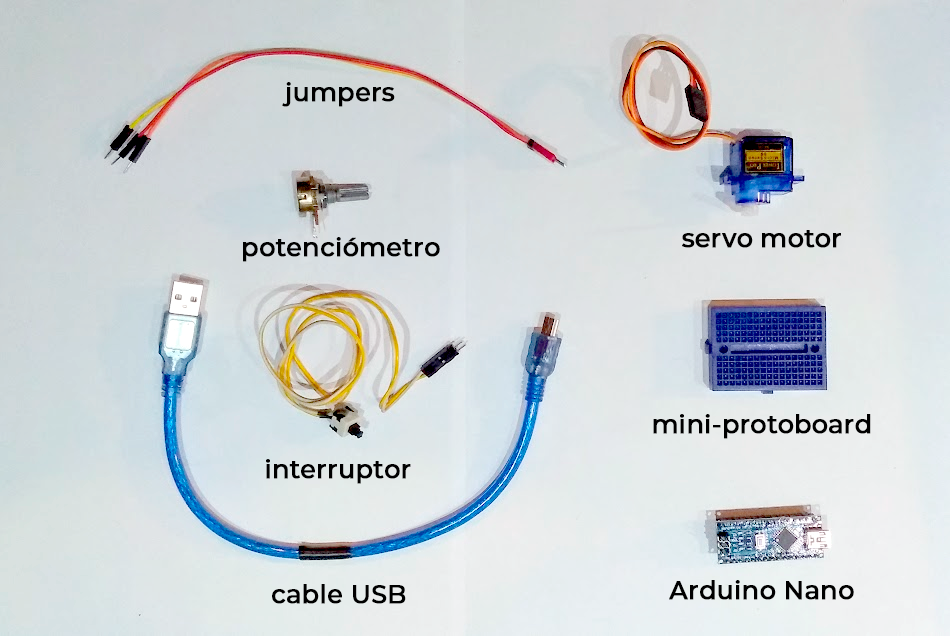
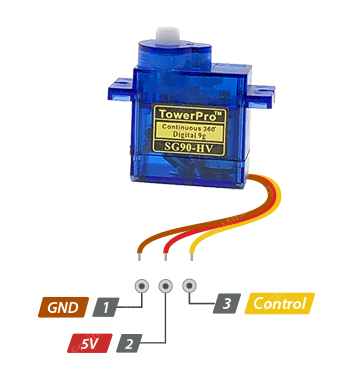
El servomotor tiene tres cables: Rojo, Negro/Marrón y Amarillo/Naranja.
- El negro o marrón es GND (ground, “masa” o “negativo”, según el barrio).
- El rojo es la alimentación +5V. La energía que usa el servo va a llegar por acá.
- El amarillo/naranja es el control/señal, y por acá va a llegar la información que modifique la posición del servo.
El arduino viene precargado con un software muy simple que hace que el servomotor se mueva de un lado a otro ritmicamente.
- Para lograr que funcione debés montar el arduino en el miniprotoboard.
- Luego extendés con los jumpers los pines del servo para que quede el control conectado al pin D9 del arduino,
- El rojo va a +5V o a Vin
- El negro a cualquier GND
- El cable USB a tu computadora, a un cargador USB o a un power bank/cargador portátil (no incluídos en el kit)
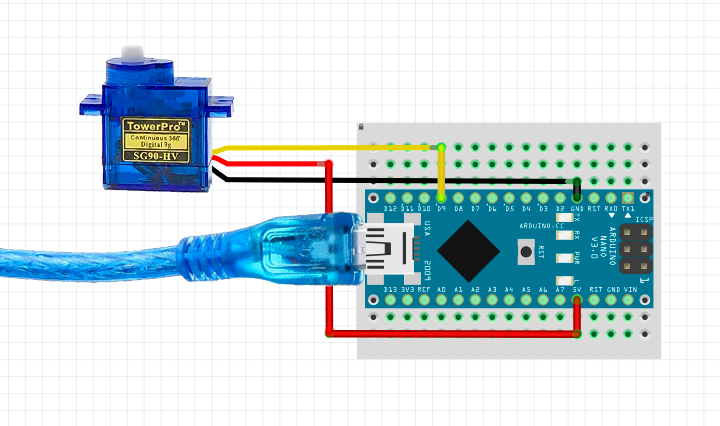
Si todo está bien conectado el servomotor se debería mover a un lado y a otro como un limpiaparabrisas de un automóvil.
Si esto no pasa, chequeá que el arduino tenga alguna luz encendida, que esté conectado a la computadora o a un cargador con energía.