Instruções Alquibots
Kit robótico Alquibot
Comece aqui: Olá, mundo!
Eu sou um Alquibot, um alquimétrico robótico de um Kit Tensegrity Zero equipado com um microcontrolador Arduino e um servo motor.
Sou um kit experimental de robótica educacional para praticar em casa com a família. Provavelmente precisarei da ajuda de alguém com mais conhecimento (ou mãos livres) para fazer uma tarefa específica. Paciência: pode parecer muito difícil no início, mas depois é mais experimental.
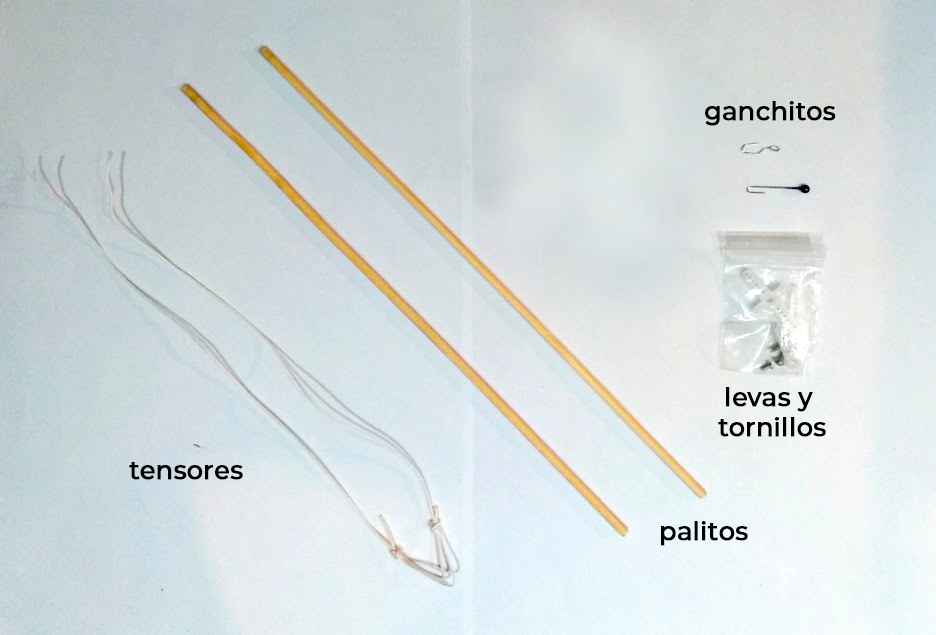
Este guia irá acompanhá-lo no processo de montagem do seu Kit Alquibot. A primeira coisa que você deve fazer é montar a estrutura do Kit Tensegrity Zero. Seguir este guia passo a passo para construir o icosaedro de tensegridade.
Nota: Existem diferentes estruturas que você pode montar usando este kit ou estendendo-o com mais hastes e elásticos. O projeto que descrevemos aqui é projetado para o icosaedro de tensegridade, mas você pode construir o octaedro com este kit (dois na verdade!) E adicionar o motor da mesma maneira.

Em seguida, você vai querer integrar o arduino e o servo motor para dar vida ao seu Alquibot.
Voltar ao início
Incorpore o servo motor
Nota: se você já armou o tensegrity, desarme-o!
É muito mais fácil instalar o servomotor na haste fora da estrutura do que tentar montá-lo na haste diretamente na estrutura. (Parece um trava-língua, mas vale o esclarecimento =)
A base do kit possui presilhas que você precisará remover para poder fixar o servomotor na haste.

Separe duas presilhas para começar. As outras duas podem ser usadas como sobressalentes ou quando você adicionar um próximo servomotor.
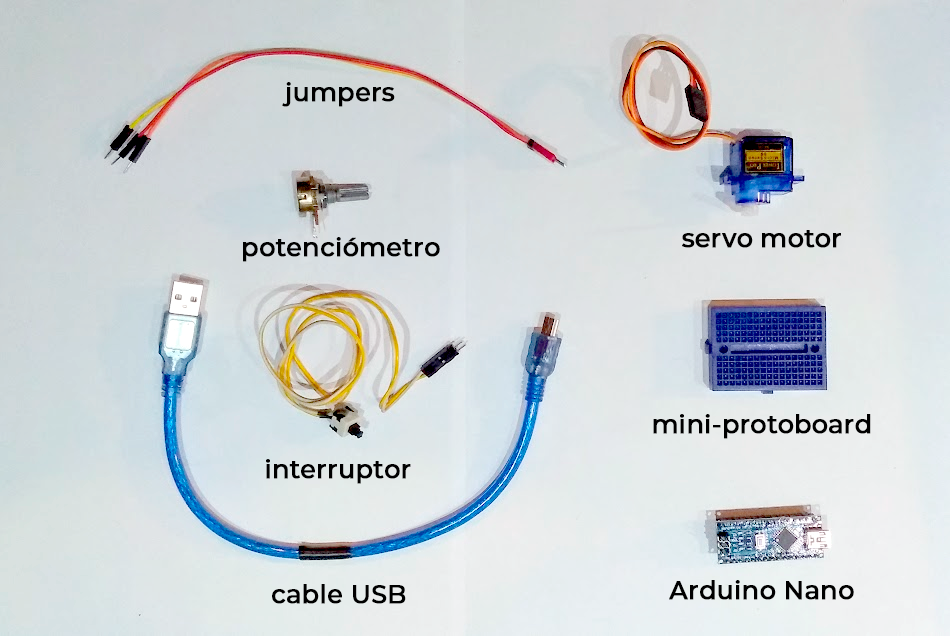
Em seguida, você precisará de um servo motor. É aquele componente azul com um fio. É um tipo de motor que possui potência suficiente para seu pequeno tamanho e a posição e a velocidade de rotação podem ser controladas com alguma precisão. Não force o giro com a mão! As engrenagens são frágeis e você pode danificá-las usando muita força para acioná-las.

Apoie o servomotor em uma das hastes perfuradas de forma que as travas laterais do motor fiquem entre os orifícios dos clipes.

Os clipes devem ser inseridos abraçando as partes superior e inferior do servomotor. Você saberá que eles estão inseridos corretamente quando ouvir um “clique” e ver que as travas se expandiram sob a haste. Se quiser removê-lo mais tarde, basta apertar as travas para uni-las e puxar o clipe para trás.
Voltar ao início
Conecte tudo
Seu Alquibot tem um cérebro, que é o microcontrolador Arduino Nano que vem com o kit. Se você instalar na mini placa de ensaio poderá fazer as conexões de uma forma mais simples usando os jumpers, aqueles pequenos cabos com conectores nas pontas.
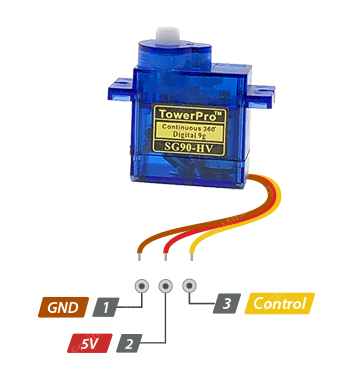
O servomotor possui três fios: Vermelho, Preto / Marrom e Amarelo / Laranja.
- Preto ou marrom é GND (“terra” ou “neutro”, dependendo da localidade).
- Vermelho é a fonte de energia + 5V. A energia usada pelo servomotor vem por aqui.
- O amarelo/laranja é o controle / sinal, e as informações de comando que modificam a posição do servo passam por aqui.
O arduino vem pré-carregado com um software muito simples que faz o servo motor se mover para frente e para trás ritmicamente.
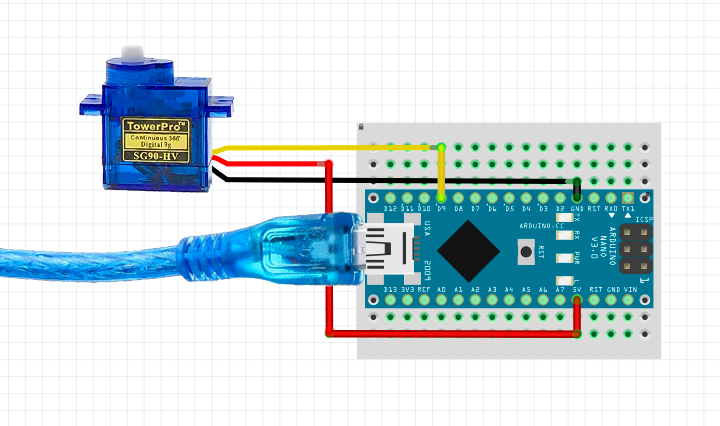
- Para fazer funcionar, você deve montar o arduino na miniprotoboard.
- Então você estende os pinos do servo com os jumpers para que o controle seja conectado ao pino D9 do arduino,
- O vermelho vai para + 5V ou Vin
- O preto para qualquer GND
- O cabo USB para o seu computador, para um carregador USB ou para um carregador portátil (não incluído no kit)
Se tudo estiver conectado corretamente, o servomotor deve se mover para frente e para trás como um limpador de pára-brisa de um carro.
Se isso não acontecer, verifique se o arduino está com energia: verifique se a luz acesa; se está conectado ao computador ou a um carregador alimentado.
Voltar ao início
Dança!
Para finalizar a montagem do sistema, você precisará conectar os braços (alavanca de plástico) ao servomotor e o tensor da ponta da alavanca à ponta de qualquer outra haste.
Provavelmente, o movimento que você obterá com as alavancas será limitado. É por isso que incluímos um conjunto adicional para que você possa adicionar para obter um movimento mais amplo.

Se você estiver montando as travas que estão na base do kit, este é um bom momento para usá-la. Você pode fixar a alavanca com um parafuso ou pressão, ou com cola. Você usará o parafuso que prende a alavanca ao servomotor no final de tudo, quando tiver certeza da calibração.

O tensor fica mais fácil de manipular e calibrar se você prender as pontas das alavancas em tensores diferentes, mas de forma que você possa facilmente alterar o comprimento, permitindo calibrar seu Alquibot para dançar. Depois, vai precisar usar o tensor (fio / corda) entre uma ponta da alavanca e uma ponta de qualquer outra haste.
Nota: você não deve conectar o tensor a uma das extremidades da haste na qual o servo está montado.
Ative a conexão eletrônica do servo e confirme se o comprimento do tensionador está no ponto certo (nem muito, nem pouco, você descobrirá nos próximos experimentos) e se o ângulo em que a alavanca está inserida é ideal, ou se você tiver que removê-lo e reconectá-lo em outro ângulo.
Nota: é muito conveniente que você desative a energia do servomotor toda vez que for operar com a alavanca, eixo, parafusos, etc. O mais simples é desconectar o cabo USB do computador ou carregador.

Voltar ao início
O músculo do bot
- Nota: calibrar a tensão dos elásticos, a posição da leba. A distribuição das forças na estrutura é um trabalho de tentativa e erro, de paciência e de aproveitar para aprender a natureza das tensegridades. Se não se mover na primeira vez, revise as etapas de cada parte ou de todo o modelo mais de uma vez. Todo esse processo é chamado de aprendizado e podemos nos divertir muito se aproveitarmos a jornada tanto quanto a linha de chegada.
Mas queremos resultados, e os queremos agora, então vamos verificar se tudo está em ordem:
- A estrutura de tensegridade está montada e apresenta uma estrutura simétrica em repouso. (Um bom momento para redistribuir as forças dos elásticos para que tudo fique equilibrado e equidistante)
- Uma das hastes tem o servo motor integrado com dois clipes.
- Uma alavanca com ou sem extensor está instalada no eixo do servomotor.
- O tensor está fixado entre as ponta da alavanca e na ponta da haste que não seja a mesma do servomotor.
- O tensor está relativamente tenso (sim, é uma redundância, mas importante)
- O servomotor está ligado ao Arduino através da miniprotoboard
- O Arduino tem energia elétrica (tem LEDs acesos) e o servomotor se move.
- A alavanca gira livremente, puxando o tensor e modificando a distância entre dois ou mais vértices opostos da tensegridade.
Se toda esta lista de condições for atendida, seu Alquibot deve estar dançando, ou tentando se aproximar da pista de dança.
Se alguma dessas coisas não estiver acontecendo, você pode dar um passo atrás ou revisar as ilustrações, fotos e vídeos para confirmar se tudo está no lugar.
Deixe-nos seus comentários, fotos e vídeos de seu processo de experimentação.
Nota: existem muitas outras configurações possíveis: outras estruturas, mais servomotores e graus de movimento, sensores, opções de controle como botões e potenciômetros. Este é apenas o começo!

Voltar ao início
Drivers?
Driver CH340 para Arduino chinos o genéricos

Nesta publicação, fornecemos o Driver (Driver CH340) para algumas placas arduino que vêm com alguns de nossos kits.
As placas compatíveis com Arduino substituem o FT232RL ou ATMEGA16u2 por um circuito integrado de origem chinesa conhecido como CH340. O driver CH340 é o software necessário para operar o circuito integrado da interface USB em vários sistemas operacionais (windows, linux, MAC, etc.). O Driver CH340 está disponível para download abaixo. Também fornecemos as instruções para sua instalação em Windows, Linux e MAC como suporte para nossos clientes que adquirirem essas placas.
Atenção: Se você deseja fazer o download do driver, os links estão na parte inferior da página.
Instalação do driver CH340 no Windows
- Descompacte o arquivo ZIP em uma pasta, encontraremos 2 pastas. Abra a pasta CH341SER que contém o instalador do driver CH340.

- Execute o programa de instalação ou “setup.exe”. O sistema operacional pode nos perguntar se confiamos no fornecedor do software, neste caso devemos aceitar.

- Depois de copiar os drivers, o programa de instalação nos notificará que a instalação foi concluída,

- conecte o arduino ao PC e espere que o Windows detecte e instale os drivers para o dispositivo conectado.

- Abrimos o gerenciador de dispositivos (clique com o botão direito em computador> Propriedades> Gerenciador de dispositivos) para verificar se o driver foi instalado corretamente, também podemos ver o número da porta serial que foi atribuído (neste caso COM14).
Baixe o driver CH340 para arduino genérico
Abaixo estão os links para download do driver CH340, versões mais atualizadas (novembro de 2017):
Baixar o driver para Windows
Baixar o driver para MAC
Baixar o driver para Linux
Instruções adicionais
https://www.youtube.com/watch?v=RSS97Y8bYFg
https://www.youtube.com/watch?v=IDM3MOWAcl0